Algorithms
Scientific documentation of the algorithms used in ESPectre for Wi-Fi CSI-based motion detection.
Table of Contents
- Overview
- Processing Pipeline
- Gain Lock (Hardware Stabilization)
- CV Normalization (Gain-Invariant Turbulence)
- MVS: Moving Variance Segmentation
- ML: Neural Network Detector
- Automatic Subcarrier Selection
- Low-Pass Filter
- Hampel Filter
- CSI Features
- References
Overview
ESPectre uses a combination of signal processing algorithms to detect motion from Wi-Fi Channel State Information (CSI).
What is CSI? (click to expand)
**Channel State Information (CSI)** represents the physical characteristics of the wireless communication channel between transmitter and receiver. Unlike simple RSSI (Received Signal Strength Indicator), CSI provides rich, multi-dimensional data about the radio channel. **What CSI Captures:** *Per-subcarrier information:* - **Amplitude**: Signal strength for each OFDM subcarrier (64 for HT20 mode) - **Phase**: Phase shift of each subcarrier - **Frequency response**: How the channel affects different frequencies *Environmental effects:* - **Multipath propagation**: Reflections from walls, furniture, objects - **Doppler shifts**: Changes caused by movement - **Temporal variations**: How the channel evolves over time - **Spatial patterns**: Signal distribution across antennas/subcarriers **Why It Works for Movement Detection:** When a person moves in an environment, they alter multipath reflections, change signal amplitude and phase, create temporal variations in CSI patterns, and modify the electromagnetic field structure. These changes are detectable even through walls, enabling **privacy-preserving presence detection** without cameras, microphones, or wearable devices.Processing Pipeline
┌───────────────────────────────────────────────────────────────────────────────────┐
│ CSI PROCESSING PIPELINE │
├───────────────────────────────────────────────────────────────────────────────────┤
│ │
│ ┌──────────┐ ┌──────────┐ ┌──────────────┐ ┌─────────────┐ │
│ │ CSI Data │───▶│Gain Lock │───▶│ Band Select │───▶│ Turbulence │ │
│ │ N subcs │ │ AGC/FFT │ │ 12 subcs │ │ σ/μ (CV) │ │
│ └──────────┘ └──────────┘ └──────────────┘ └──────┬──────┘ │
│ (3s, 300 pkt) (7.5s, 10×window) │ │
│ ▼ │
│ ┌───────────┐ ┌───────────────┐ ┌─────────────────┐ ┌──────────────────┐ │
│ │ IDLE or │◀───│ Adaptive │◀───│ Moving Variance │◀─│ Optional Filters │ │
│ │ MOTION │ │ Threshold │ │ (window=75) │ │ LowPass + Hampel │ │
│ └───────────┘ └───────────────┘ └─────────────────┘ └──────────────────┘ │
│ │
└───────────────────────────────────────────────────────────────────────────────────┘
Calibration sequence (at boot): 1. Gain Lock (3s, 300 packets): Collect AGC/FFT, lock values 2. Band Calibration (~7.5s, 10 × window_size packets): Select 12 optimal subcarriers, calculate baseline variance
With default window_size=75, this means 750 packets. If you change segmentation_window_size, the calibration buffer adjusts automatically.
Data flow per packet (after calibration):
1. CSI Data: Raw I/Q values for 64 subcarriers (HT20 mode)
- Espressif format: [Q₀, I₀, Q₁, I₁, ...] (Imaginary first, Real second per subcarrier)
2. Amplitude Extraction: |H| = √(I² + Q²) for selected 12 subcarriers
3. Spatial Turbulence (CV): CV = σ(amplitudes) / μ(amplitudes) - gain-invariant variability
4. Hampel Filter (optional): Remove outliers using MAD
5. Low-Pass Filter (optional): Remove high-frequency noise (Butterworth 1st order)
6. Moving Variance: Var(turbulence) over sliding window
7. Adaptive Threshold: Compare variance to Pxx(baseline_mv) → IDLE or MOTION
Gain Lock (Hardware Stabilization)
Overview
Gain Lock is a hardware-level optimization that stabilizes CSI amplitude measurements by locking the ESP32's automatic gain control (AGC) and FFT scaling. This technique is based on Espressif's esp-csi recommendations.
The Problem
The ESP32 WiFi hardware includes automatic gain control (AGC) that dynamically adjusts signal amplification based on received signal strength. While this improves data decoding reliability, it creates a problem for CSI sensing:
| Without Gain Lock | With Gain Lock |
|---|---|
| AGC varies dynamically | AGC fixed to calibrated value |
| CSI amplitudes oscillate ±20-30% | Amplitudes stable |
| Baseline appears "noisy" | Baseline flat |
| Potential false positives | Cleaner detection |
How It Works
The gain lock happens in a dedicated phase BEFORE band calibration to ensure clean data:
┌──────────────────────────────────────────────────────────────────────┐
│ TWO-PHASE CALIBRATION │
├──────────────────────────────────────────────────────────────────────┤
│ │
│ PHASE 1: GAIN LOCK (~3 seconds, 300 packets) │
│ ┌─────────────┐ ┌─────────────┐ ┌─────────────┐ │
│ │ Read PHY │───▶│ Collect │───▶│ Calculate │ │
│ │ agc_gain │ │ agc_samples│ │ Median │ │
│ │ fft_gain │ │ fft_samples│ │ │ │
│ └─────────────┘ └─────────────┘ └──────┬──────┘ │
│ │ │
│ Packet 300: ▼ │
│ ┌──────────────────────────────────────────────────────────────┐ │
│ │ phy_fft_scale_force(true, median_fft) │ │
│ │ phy_force_rx_gain(true, median_agc) │ │
│ │ → AGC/FFT now LOCKED │ │
│ └──────────────────────────────────────────────────────────────┘ │
│ │ │
│ ▼ │
│ PHASE 2: BAND CALIBRATION (~7.5 seconds, 10 × window_size packets) │
│ ┌──────────────────────────────────────────────────────────────┐ │
│ │ Now all packets have stable gain! │ │
│ │ → Baseline variance calculated on clean data │ │
│ │ → Subcarrier selection more accurate │ │
│ └──────────────────────────────────────────────────────────────┘ │
│ │
└──────────────────────────────────────────────────────────────────────┘
Why two phases? Separating gain lock from band calibration ensures: - Calibration only sees data with stable, locked gain - Baseline variance is accurate (not inflated by AGC variations) - Adaptive threshold is calculated correctly - Total time: ~10.5 seconds (3s gain lock + 7.5s calibration)
Why median instead of mean? Median is more robust against outliers: - Occasional packet with extreme gain values doesn't skew the baseline - Matches Espressif's internal methodology for gain calibration
Implementation
The gain lock uses undocumented PHY functions available on newer ESP32 variants:
// External PHY functions (from ESP-IDF PHY blob)
extern void phy_fft_scale_force(bool force_en, int8_t force_value); // fft_gain is signed
extern void phy_force_rx_gain(int force_en, int force_value);
// Calibration logic (300 packets, ~3 seconds)
// Uses median instead of mean for robustness against outliers
if (packet_count < 300) {
agc_samples[packet_count] = phy_info->agc_gain; // uint8_t
fft_samples[packet_count] = phy_info->fft_gain; // int8_t (signed!)
} else if (packet_count == 300) {
median_agc = calculate_median(agc_samples, 300);
median_fft = calculate_median(fft_samples, 300);
phy_fft_scale_force(true, median_fft);
phy_force_rx_gain(true, median_agc);
// Gain is now locked, trigger band calibration
on_gain_locked_callback();
}
CV Normalization (Gain-Invariant Turbulence)
ESPectre uses CV normalization for spatial turbulence when gain lock is not active:
turbulence = std(amplitudes) / mean(amplitudes)
This is the Coefficient of Variation (CV), a dimensionless ratio that is mathematically invariant to linear gain scaling:
CV(kA) = std(kA) / mean(kA) = k·std(A) / k·mean(A) = std(A) / mean(A) = CV(A)
If the receiver AGC scales all amplitudes by a factor k, the CV remains unchanged.
When is CV normalization used?
- Gain locked: Raw
std(amplitudes)is used (better sensitivity when gain is stable) - Gain not locked: CV normalization (
std/mean) is used (gain-invariant)
CV normalization is automatically enabled when:
1. Gain lock mode is disabled
2. Gain lock mode is auto and lock was skipped (e.g., signal too strong, AGC < 30)
3. Platform does not support gain lock (ESP32 Base, ESP32-S2)
Impact on detection: CV-normalized turbulence values are typically in the range 0.05-0.25 (compared to 2-20 for raw std). Adaptive thresholds from calibration are correspondingly smaller (order of 1e-4 to 1e-3).
Compatibility with calibrators: CV normalization works best with NBVI (non-consecutive subcarrier selection) because it selects subcarriers with different spectral characteristics, maximizing sensitivity to motion-induced changes.
Platform Support
| Platform | Gain Lock | CV Normalization |
|---|---|---|
| ESP32-S3 | Supported | When lock skipped |
| ESP32-C3 | Supported | When lock skipped |
| ESP32-C5 | Supported | When lock skipped |
| ESP32-C6 | Supported | When lock skipped |
| ESP32 (original) | Not available | Always enabled |
| ESP32-S2 | Not available | Always enabled |
On platforms without gain lock support, CV normalization ensures stable detection despite AGC variations.
Reference: Espressif esp-csi example
MVS: Moving Variance Segmentation
Overview
MVS (Moving Variance Segmentation) is the core motion detection algorithm. It analyzes the variance of spatial turbulence over time to distinguish between idle and motion states.
The Insight
Human movement causes multipath interference in Wi-Fi signals, which manifests as: - Idle state: Stable CSI amplitudes → low turbulence variance - Motion state: Fluctuating CSI amplitudes → high turbulence variance
By monitoring the variance of turbulence over a sliding window, we can reliably detect when motion occurs.
Algorithm Steps
-
Spatial Turbulence (CV Normalization)
turbulence = σ(amplitudes) / μ(amplitudes)Whereaᵢare the amplitudes of the 12 selected subcarriers, σ is the standard deviation, and μ is the mean. This is the Coefficient of Variation (CV), which is gain-invariant: if all amplitudes are scaled by a factor k (e.g., due to AGC), thenσ(kA)/μ(kA) = σ(A)/μ(A). This eliminates the need for gain compensation on platforms without gain lock (e.g., ESP32 Base). -
Moving Variance (Two-Pass Algorithm)
μ = Σxᵢ / n # Mean of turbulence buffer Var = Σ(xᵢ - μ)² / n # Variance (numerically stable)The two-pass algorithm avoids catastrophic cancellation that can occur with running variance on float32. -
State Machine
if state == IDLE and variance > threshold: state = MOTION elif state == MOTION and variance < threshold: state = IDLE
Performance
For detailed performance metrics (confusion matrix, test methodology, benchmarks), see PERFORMANCE.md.
Reference: [1] MVS segmentation: the fused CSI stream and corresponding moving variance sequence (ResearchGate)
ML: Neural Network Detector
Overview
The ML Detector uses a pre-trained neural network to classify motion based on statistical features extracted from CSI turbulence patterns. Unlike MVS which uses hand-crafted thresholds, ML learns decision boundaries from labeled training data.
The Insight
Motion detection can be framed as a binary classification problem: - Input: Statistical features computed from a sliding window of turbulence values - Output: Probability of motion (0.0 to 1.0)
A neural network can learn complex, non-linear patterns that may be missed by simple threshold-based methods.
Architecture
The ML detector uses a compact Multi-Layer Perceptron (MLP):
Input (12 features)
↓
Dense(16, ReLU) ← 12×16 + 16 = 208 parameters
↓
Dense(8, ReLU) ← 16×8 + 8 = 136 parameters
↓
Dense(1, Sigmoid) ← 8×1 + 1 = 9 parameters
↓
Output (probability)
Total: ~350 parameters, ~2 KB (constexpr float weights)
Feature Extraction
For each sliding window of 75 turbulence values, 12 statistical features are extracted. See CSI Features for the complete feature list with detailed definitions.
Inference Pipeline
┌──────────────┐ ┌──────────────┐ ┌───────────────────┐ ┌──────────────┐
│ CSI Packet │───▶│ Turbulence │───▶│ Optional Filters │───▶│ Buffer (50) │
│ │ │ σ/μ (CV) │ │ Hampel + LowPass │ │ │
└──────────────┘ └──────────────┘ └───────────────────┘ └──────┬───────┘
│
▼
┌──────────────┐ ┌──────────────┐ ┌──────────────┐ ┌──────────────┐
│ IDLE/MOTION │◀───│ Threshold │◀───│ Probability │◀───│ 12 Features │
│ │ │ > 0.5 │ │ [0.0-1.0] │ │ → Neural Net │
└──────────────┘ └──────────────┘ └──────────────┘ └──────────────┘
Filter support: The ML detector shares the same SegmentationContext as MVS, so it supports optional low-pass and Hampel filters on the turbulence stream before feature extraction. Filters are disabled by default.
Calibration
ML uses fixed subcarriers - no calibration needed:
| Algorithm | Subcarrier Selection | Threshold | Boot Time |
|---|---|---|---|
| MVS | NBVI (~7.5s) | Adaptive (percentile-based) | ~10.5s |
| ML | Fixed (12 even, DC excluded) | Fixed (0.5 probability) | ~3s |
ML uses 12 fixed subcarriers selected to avoid DC and improve stability: [12, 14, 16, 18, 20, 24, 28, 36, 40, 44, 48, 52]. This eliminates the 7.5-second band calibration phase, reducing boot time to ~3 seconds (gain lock only).
Training
For the complete training workflow (data collection, training commands, export formats), see ML_DATA_COLLECTION.md.
The training process uses 5-fold stratified cross-validation with early stopping, dropout, and FP-penalized class weights. The FP penalty multiplies the IDLE class weight, making the model more conservative (fewer false positives at the cost of slightly lower recall).
Architecture Selection
The 12→16→8→1 architecture was validated as optimal through 5-fold CV on 13,711 samples:
| Architecture | F1 (5-fold CV) | Params | Weights |
|---|---|---|---|
| 12→16→8→1 | 98.3% +/- 0.2% | 353 | 1.4 KB |
| 12→24→12→1 | 98.2% +/- 0.5% | 625 | 2.4 KB |
| 12→24→1 | 98.1% +/- 0.2% | 337 | 1.3 KB |
| 12→12→8→4→1 | 97.8% +/- 0.5% | 301 | 1.2 KB |
| 12→8→1 | 97.7% +/- 0.3% | 113 | 0.4 KB |
The current architecture achieves the highest F1 with the lowest variance and the best FP rate.
Performance
ML achieves higher recall than MVS with a small tradeoff in precision. ML's strength is generalization -- it performs well across different environments without per-environment calibration.
See PERFORMANCE.md for detailed per-chip results and TUNING.md for configuration and tuning guidance.
Automatic Subcarrier Selection
Overview
ESPectre uses NBVI for automatic subcarrier band selection, achieving excellent performance with zero manual configuration:
| Algorithm | Selection | Best For |
|---|---|---|
| NBVI | 12 non-consecutive subcarriers | Spectral diversity, resilient to interference |
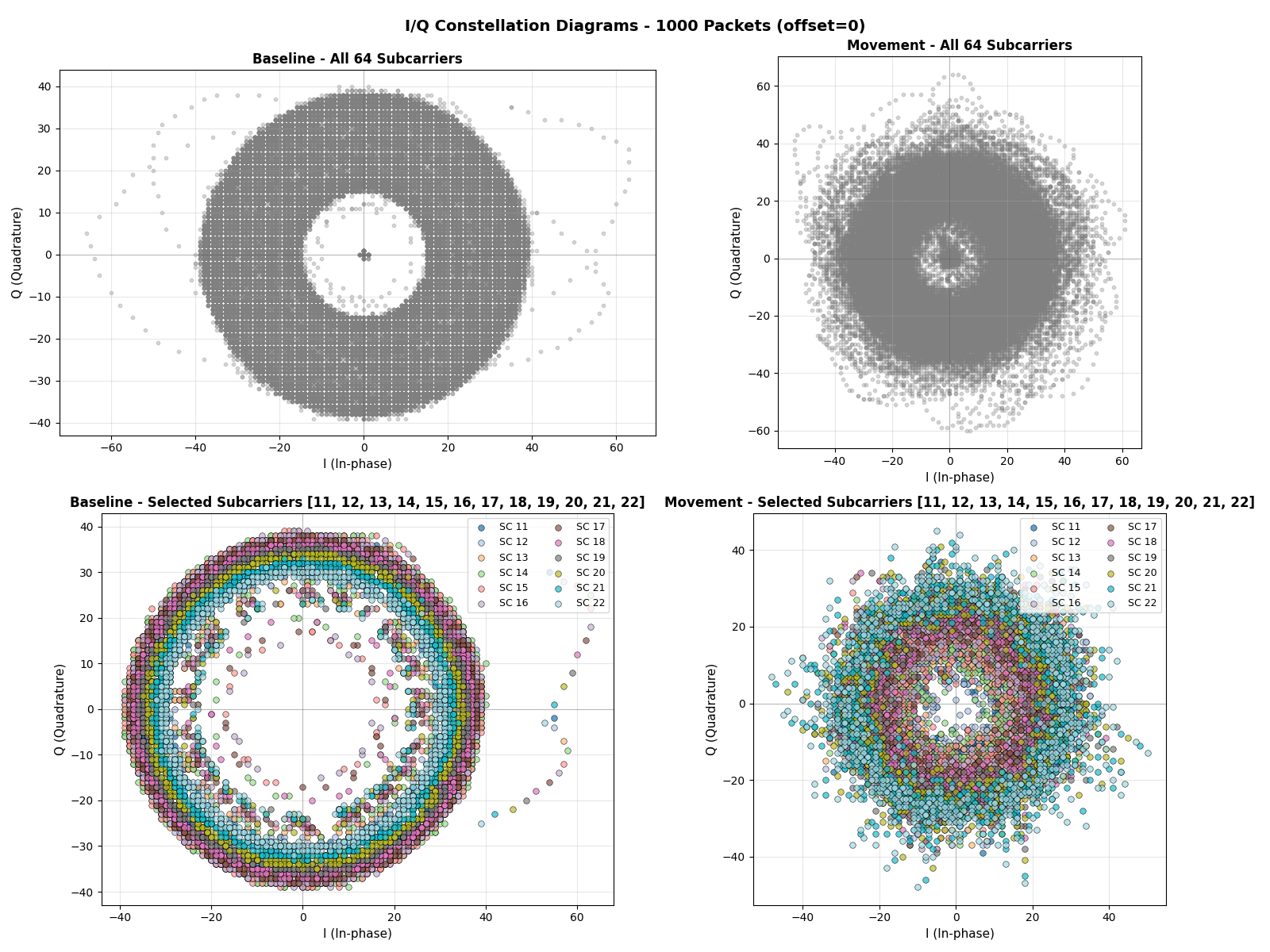 I/Q constellation diagrams showing the geometric representation of WiFi signal propagation in the complex plane. The baseline (idle) state exhibits a stable, compact pattern, while movement introduces entropic dispersion as multipath reflections change.
I/Q constellation diagrams showing the geometric representation of WiFi signal propagation in the complex plane. The baseline (idle) state exhibits a stable, compact pattern, while movement introduces entropic dispersion as multipath reflections change.
The Problem
WiFi CSI provides 64 subcarriers in HT20 mode, but not all are equally useful for motion detection: - Some are too weak (low SNR) - Some are too noisy (high variance even at rest) - Some are in guard bands or DC zones - Manual selection works but doesn't scale across environments
Challenge: Find an automatic method that selects the optimal band for motion detection.
See TUNING.md for configuration options.
NBVICalibrator
The NBVICalibrator class handles the complete calibration lifecycle:
- File-based CSI buffer I/O (write during collection, read during calibration)
- Packet counting and buffer-full detection
- Memory-efficient cleanup (buffer file removed after calibration)
- NBVI-based subcarrier selection algorithm
NBVI Algorithm
The NBVI (Normalized Baseline Variability Index) algorithm selects 12 non-consecutive subcarriers by analyzing the variability-to-mean ratio of each subcarrier during baseline.
Key Insight
NBVI combines two factors for each subcarrier: 1. σ/μ (coefficient of variation): Lower = more stable 2. σ/μ² (signal strength factor): Favors subcarriers with strong signals
The weighted formula balances stability and signal strength:
NBVI = α × (σ/μ²) + (1-α) × (σ/μ)
Where α = 0.5 by default (balanced weighting).
Algorithm
def nbvi_calibrate(csi_buffer, band_size=12, alpha=0.5):
# 1. Find quietest baseline window using percentile detection
windows = find_candidate_windows(csi_buffer, window_size=200)
# 2. For best window, calculate NBVI for each subcarrier
for window in windows:
for subcarrier in valid_subcarriers:
magnitudes = extract_magnitudes(window, subcarrier)
mean = sum(magnitudes) / len(magnitudes)
std = standard_deviation(magnitudes)
# NBVI formula
nbvi[subcarrier] = alpha * (std / mean**2) + (1-alpha) * (std / mean)
# 3. Apply noise gate (exclude weak subcarriers)
valid = [sc for sc in subcarriers if mean[sc] > percentile(means, 25)]
# 4. Select 12 subcarriers with lowest NBVI and spacing
selected = select_with_spacing(sorted_by_nbvi(valid), k=12)
# 5. Validate using MVS false positive rate
fp_rate, mv_values = validate_subcarriers(selected)
if fp_rate < best_fp_rate:
best_band = selected
best_mv_values = mv_values
return best_band, best_mv_values
Why NBVI?
NBVI selects non-consecutive subcarriers, which provides: - Spectral diversity: Different frequency components - Noise resilience: Interference typically affects adjacent subcarriers - Environment adaptation: Works well in complex multipath environments
Adaptive Threshold Calculation
After band selection, NBVI returns the moving variance values from baseline. The adaptive threshold is then calculated as a percentile with an optional multiplier:
def calculate_adaptive_threshold(mv_values, percentile, factor):
return calculate_percentile(mv_values, percentile) * factor
Two modes are supported:
| Strategy | Formula | Effect |
|---|---|---|
| Auto (default) | P95 × 1.1 | Balanced sensitivity/false positives |
| Min | P100 × 1.0 | Maximum sensitivity (may have FP) |
See TUNING.md for configuration options (segmentation_threshold).
Performance
NBVI is the default calibration algorithm, selecting 12 non-consecutive subcarriers for spectral diversity and resilience to narrowband interference. See PERFORMANCE.md for detailed metrics.
Computational Complexity
| Algorithm | Complexity | Calibration Time (Python) | Notes |
|---|---|---|---|
| NBVI | O(W × N × P) | ~30-50ms | Single-pass analysis |
Where W = window size, N = subcarriers, P = packets.
Benchmark Results (1000 packets, Python on desktop):
| Chip | NBVI Calibration Time |
|---|---|
| C6 | 32ms |
| S3 | 52ms |
NBVI analyzes each subcarrier independently in a single pass, making it efficient for real-time calibration on embedded devices.
Guard Bands and DC Zone
HT20 mode (64 subcarriers) configuration:
| Parameter | Value |
|---|---|
| Total Subcarriers | 64 |
| Guard Band Low | 11 |
| Guard Band High | 52 |
| DC Subcarrier | 32 |
| Valid Subcarriers | 41 |
Fallback Behavior
When calibration cannot find valid bands (e.g., poor signal quality): NBVI falls back to the default band [11-22] when calibration fails (e.g., due to motion during calibration or insufficient data).
Low-Pass Filter
Overview
The Low-Pass Filter removes high-frequency noise from turbulence values. This is particularly useful in noisy RF environments where the selected band may include subcarriers susceptible to interference.
See TUNING.md for configuration and when to enable.
How It Works
The filter uses a 1st-order Butterworth IIR filter implemented for real-time processing:
- Bilinear transform to convert analog filter to digital
- Difference equation:
y[n] = b₀·x[n] + b₀·x[n-1] - a₁·y[n-1] - Single sample latency for real-time processing
Algorithm
class LowPassFilter:
def __init__(self, cutoff_hz=11.0, sample_rate_hz=100.0):
# Bilinear transform
wc = tan(π × cutoff / sample_rate)
k = 1.0 + wc
self.b0 = wc / k
self.a1 = (wc - 1.0) / k
self.x_prev = 0.0
self.y_prev = 0.0
def filter(self, x):
y = self.b0 * x + self.b0 * self.x_prev - self.a1 * self.y_prev
self.x_prev = x
self.y_prev = y
return y
Why 11 Hz Cutoff
Human movement generates signal variations typically in the 0.5-10 Hz range. RF noise and interference are usually >15 Hz. The 11 Hz cutoff: - Preserves motion signal (>90% recall) - Removes high-frequency noise - Reduces false positives in noisy environments
Hampel Filter
Overview
The Hampel filter removes statistical outliers using the Median Absolute Deviation (MAD) method. It can be applied to turbulence values before detection to reduce false positives from sudden interference.
See TUNING.md for configuration and when to enable.
How It Works
- Maintain sliding window of recent turbulence values
- Calculate median of the window
- Calculate MAD:
MAD = median(|xᵢ - median|) - Detect outliers: If
|x - median| > threshold × 1.4826 × MAD, replace with median
The constant 1.4826 is the consistency constant for Gaussian distributions.
Algorithm
def hampel_filter(value, buffer, threshold=4.0):
# Add to circular buffer
buffer.append(value)
# Calculate median
sorted_buffer = sorted(buffer)
median = sorted_buffer[len(buffer) // 2]
# Calculate MAD
deviations = [abs(x - median) for x in buffer]
mad = sorted(deviations)[len(deviations) // 2]
# Check if outlier
scaled_mad = 1.4826 * mad * threshold
if abs(value - median) > scaled_mad:
return median # Replace outlier
return value # Keep original
Implementation Optimization
For embedded systems, the implementation uses: - Insertion sort instead of quicksort (faster for N < 15) - Pre-allocated buffers (no dynamic allocation) - Circular buffer for O(1) insertion
Reference: [6] CSI-F: Feature Fusion Method (MDPI Sensors)
CSI Features (for ML)
The ML detector extracts 12 non-redundant statistical features from a sliding window of turbulence values. All features are computed from the 75-sample turbulence buffer (configured via segmentation_window_size), ensuring stable statistical estimates.
Design Principles
- No redundant features: Each feature provides unique information (e.g., no variance alongside std, no range alongside max/min)
- All turbulence-based: Higher-order moments (skewness, kurtosis) are computed from the 75-sample turbulence buffer rather than from 12-sample packet amplitudes, giving much more stable estimates
- MicroPython compatible: Pure Python implementation without numpy at runtime
Feature List
| # | Feature | Formula | Description |
|---|---|---|---|
| 0 | turb_mean |
μ = Σxᵢ/n | Mean turbulence (central tendency) |
| 1 | turb_std |
σ = √(Σ(xᵢ-μ)²/n) | Standard deviation (spread) |
| 2 | turb_max |
max(xᵢ) | Maximum value in window |
| 3 | turb_min |
min(xᵢ) | Minimum value in window |
| 4 | turb_zcr |
crossings / (n-1) | Zero-crossing rate around mean |
| 5 | turb_skewness |
E[(X-μ)³]/σ³ | Turbulence asymmetry (3rd moment) |
| 6 | turb_kurtosis |
E[(X-μ)⁴]/σ⁴ - 3 | Turbulence tailedness (4th moment) |
| 7 | turb_entropy |
-Σpᵢ log₂(pᵢ) | Shannon entropy (randomness) |
| 8 | turb_autocorr |
C(1)/C(0) | Lag-1 autocorrelation |
| 9 | turb_mad |
median(|xᵢ - median(x)|) | Median absolute deviation |
| 10 | turb_slope |
Linear regression | Temporal trend |
| 11 | turb_delta |
x[-1] - x[0] | Start-to-end change |
Feature Categories
Basic Statistics (0-3): Standard statistical measures of the turbulence buffer.
Signal Dynamics (4): - Zero-crossing rate: Fraction of consecutive samples crossing the mean. High ZCR indicates rapid oscillations (motion), low ZCR indicates stable signal (idle). Very fast to compute.
Higher-Order Moments (5-6): Computed from the turbulence buffer (75 samples) for stable estimates. - Skewness: Asymmetry of turbulence distribution. Motion typically increases skewness. - Kurtosis: "Tailedness" of turbulence distribution. Motion produces heavier tails.
Robust Statistics (7, 9): - Entropy: High during motion (unpredictable), low during idle (stable) - MAD: Median Absolute Deviation - robust alternative to std, less sensitive to outliers
Temporal Structure (8, 10-11): - Autocorrelation: Lag-1 temporal correlation. High during idle (smooth signal), low during motion (turbulent) - Slope: Positive = increasing turbulence, negative = decreasing - Delta: Quick indicator of overall change
Detailed Definitions
Zero-Crossing Rate:
ZCR = count(sign(x[i] - μ) ≠ sign(x[i-1] - μ)) / (n - 1)
Counts how often the signal crosses the mean value. Ranges from 0.0 (monotonic) to 1.0 (alternating every sample).
Skewness (third standardized moment):
γ₁ = E[(X - μ)³] / σ³
- γ₁ > 0: Right-skewed (tail on right)
- γ₁ < 0: Left-skewed (tail on left)
- γ₁ = 0: Symmetric
Kurtosis (fourth standardized moment, excess):
γ₂ = E[(X - μ)⁴] / σ⁴ - 3
- γ₂ > 0: Heavy tails (leptokurtic)
- γ₂ < 0: Light tails (platykurtic)
- γ₂ = 0: Normal distribution (mesokurtic)
Shannon Entropy:
H = -Σ pᵢ × log₂(pᵢ)
Computed by binning turbulence values (10 bins) and calculating the entropy of the histogram. Higher entropy indicates more randomness/unpredictability.
Lag-1 Autocorrelation:
r₁ = (1/(n-1)) Σ(xᵢ - μ)(xᵢ₊₁ - μ) / σ²
Measures temporal correlation between consecutive values. Ranges from -1.0 to 1.0. Smooth signals have high positive autocorrelation; turbulent signals have low autocorrelation.
Median Absolute Deviation:
MAD = median(|xᵢ - median(x)|)
Robust measure of spread. Unlike std, a single outlier cannot dramatically inflate the MAD. Computed using insertion sort (efficient for n=50 on ESP32).
Linear Regression Slope:
slope = Σ(iᵢ - ī)(xᵢ - x̄) / Σ(iᵢ - ī)²
Where i = time index, x = turbulence value. Positive slope indicates increasing motion intensity.
References
-
Subcarrier selection for efficient CSI-based indoor localization (2018)
Spectral de-correlation and feature diversity.
Read paper -
Indoor Motion Detection Using Wi-Fi Channel State Information in Flat Floor Environments Versus in Staircase Environments (2018) Moving variance segmentation Read paper
-
WiFi Motion Detection: A Study into Efficacy and Classification (2019) Signal processing methods for motion detection.
Read paper -
A Novel Passive Indoor Localization Method by Fusion CSI Amplitude and Phase Information (2019) SNR considerations and noise gate strategies.
Read paper -
CSI-F: A Human Motion Recognition Method Based on Channel-State-Information Signal Feature Fusion (2024) Hampel filter and statistical robustness.
Read paper -
Linear‐Complexity Subcarrier Selection Strategy for Fast Preprocessing of CSI in Passive Wi‐Fi Sensing Classification Tasks (2025) Computational efficiency for embedded systems.
Read paper -
CIRSense: Rethinking WiFi Sensing with Channel Impulse Response (2025)
SSNR (Sensing Signal-to-Noise Ratio) optimization.
Read paper
License
GPLv3 - See LICENSE for details.